所谓LiDAR/Radar
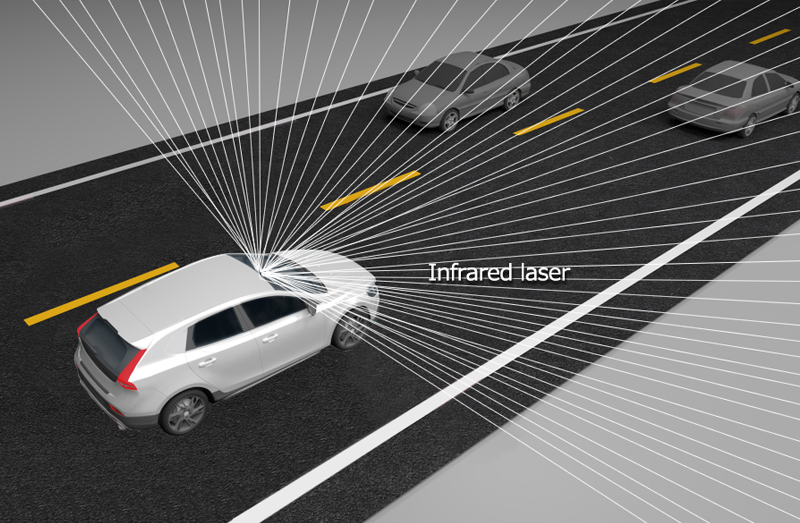
- LiDAR (Light Detection and Ranging 或 Laser Imaging Detection and Ranging)
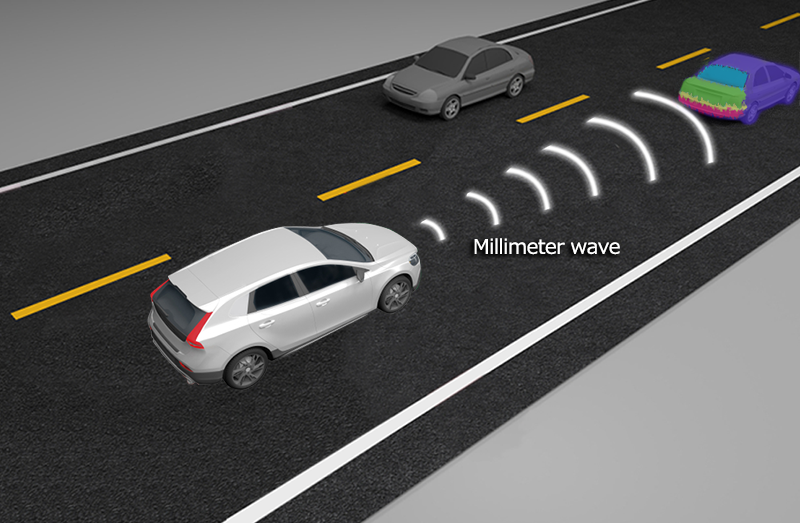
- Radar (RAdio Detection And Ranging)
LiDAR是一项辐射红外激光,根据其反射来感测周围的人、物体的距离和位置的技术。
Radar辐射毫米波或微波,与LiDAR一样,根据其反射来感测周围的人、物体的距离和位置。
向LiDAR/Radar采用6in1传感器的效果
效果① : 以一个芯片实现组件安装误差和倾斜的计测或修正
通常,在车辆工厂进行装配和经销商出货时等LiDAR/Radar的组件上,有的情况下会出现安装误差。
需要由工厂和经销商等对此类安装误差进行矫正,调整为不会对LiDAR/Radar的辐射位置和3D map内检测物体的位置精度产生影响。
因此,在工厂和经销商处,在停车环境下利用3轴加速度传感器进行斜度检测,计测安装误差,并在行驶→停车时,还使用3轴陀螺仪传感器的数据,进行LiDAR/Radar组件的斜度计测。
只要是已将3轴加速度传感器和3轴陀螺仪传感器(角速度传感器)做成一个芯片的6轴组合传感器也即6in1传感器,就可实现这两种功能。
【要点】
- 可在温度恒定、完全停车状态下,通过加速度传感器进行0.2°的斜度检测
- 即使是在温度恒定、且有某种运动的环境下,也只要通过使用陀螺仪传感器(角速度传感器)数据就可进行0.1°的检测
效果② : 提高检测物体和自车位置精度,即使在苛严的环境下也实现稳定的感测
"如果是像LiDAR那样周围环境的扫描周期长的周围检测传感器,则需要对上一个周期检测到的周围环境的点群和本周期检测到的周围环境的点群进行核对。
通过使用从6轴传感器测得的车辆运动数据,就可减少上一个周期检测到的点群和本周期检测到点群的核对所需的计算量。
此外,在行驶时,6in1传感器可动态检测坡道和路面的起伏状态,系统可根据传感器数据进行激光辐射位置修正或在地图上进行检测对象物的位置修正。
再者,在隧道内等处GNSS中断时,系统也可根据坡道检测和车辆的行进方向检测进行高度和方位角的计算,并推算在已被识别的空间内的自车位置。
【要点】
- 即使是在像LiDAR/Radar那样易曝露于高温、高振动环境下的系统上,也可向系统稳定地发送检测数据
效果③ : 实现对6轴检测和功能安全的兼顾
LiDAR/Radar在安全方面起着重要的作用,常常要求系统符合功能安全(ISO26262),在系统级,经常要求具备ASIL-D,对安装在LiDAR/Radar上的惯性传感器等设备也开始提出功能安全要求。
松下电器推出的6in1传感器,在单芯片MEMS中安装的3轴加速度传感器、3轴陀螺仪传感器共6轴上全都安装有诊断功能,传感器单芯片符合ASIL-B(D),只要安装一个6in1传感器,在需要6轴惯性传感器和符合功能安全的系统上,即使没有安装多个惯性传感器,也可对6轴检测和功能安全进行兼顾。
【要点】
-
通过安装一个兼顾ASIL-B(D)和6轴检测的6in1传感器,就可通过一个芯片对6轴检测和符合功能安全进行兼顾。
此外,由于可通过一个芯片符合功能安全,因而无需安装多个传感器,可相比过去降低BOM成本。
