惯性传感器的基础知识
~陀螺仪传感器、加速度传感器~
2020-09-23
如今,为了追求自动驾驶、安全性和舒适性的提高,数不胜数的大量传感器已被用到汽车上。
其中,陀螺仪传感器和加速度传感器之类的惯性传感器受到了广泛的关注。
因此,本次我们将对陀螺仪传感器和加速度传感器的基础知识进行解说。
陀螺仪传感器
所谓陀螺仪传感器
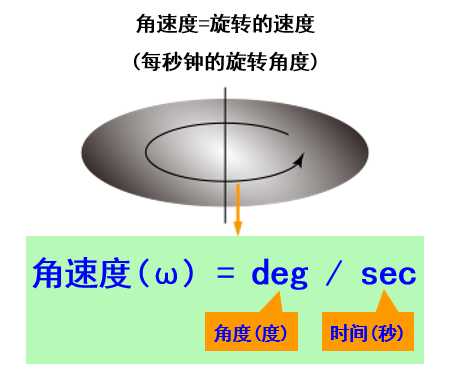
陀螺仪传感器也被称为角速度传感器,是一种利用科里奥利力将物体的旋转或方向的变化作为角速度来检测,并以电信号方式输出的传感器。
换句话说,角速度是角度除以时间,单位用dps (degree per second)来表示。
譬如,60秒钟旋转一周的物体的角速度为360deg ÷ 60sec = 6 dps。
关于科里奥利力
要理解陀螺仪传感器,首先需要弄清科里奥利力。
科里奥利力是在旋转系统中作用于运动物体的表观力。
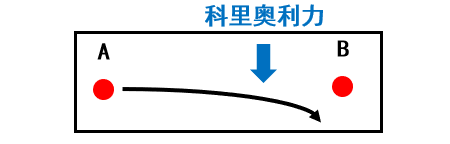
作为一个解释科里奥利力是什么的例子,我们将利用从右图A点向B点抛掷球时的轨迹进行说明。
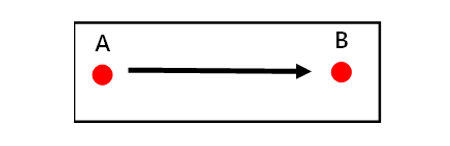
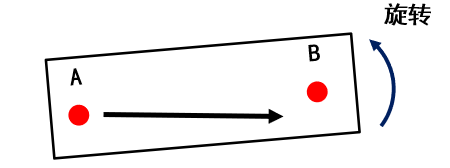
这个作用于侧面的表观力叫做科里奥利力。
科里奥利力的计算公式如下。
F =2mvω
根据这个关系,角速度如下。
ω =F/2mv
- F
- : 科里奥利力 (N)
- m
- : 物体的质量 (kg)
- v
- : 运动速度 (m/s)
- ω
- : 角速度 (dps)
换句话说,如果科里奥利力可以测量,也就可以求得角速度。
振动式陀螺仪传感器的原理
接下来就陀螺仪传感器中最常见的振动式陀螺仪传感器,说明其原理。
振动式陀螺仪传感器在让振子振动的状态下检测振子旋转产生的科里奥利力,求得角速度。
检测方式包括压电方式和静电电容方式等。
- 压电方式
首先,说明压电方式的原理。
首先,如图a)所示,在非旋转状态下使得振子沿X轴方向按一定周期振动。可以说,这就是前项中在A点和B点抛掷球的状态。
如b)所示,当对其施加旋转时,在Y轴方向会产生科里奥利力,振子向Y轴方向拐弯,由于压电效应产生电压。
通过测量此电压来检测科里奥利力,求得角速度。a) 非旋转状态的振子 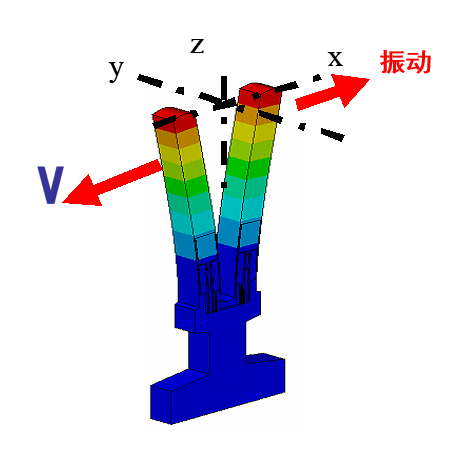
b) 旋转状态的振子 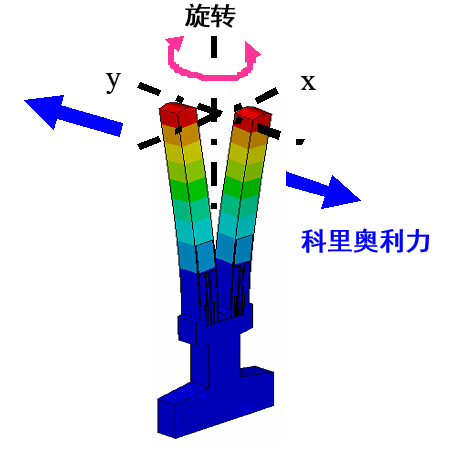
- 静电电容方式
接下来说明静电电容方式的原理。
首先,如c)所示,在非旋转状态下向驱动电极施加矩形波的电压,使得振子沿X轴方向按一定周期振动。此时,假设检测电极与振子间的静电电容C1和C2处于相等的状态。
如d)所示,当对其施加旋转时,在Y轴方向会产生科里奥利力,振子向Y轴方向偏移。
此时,检测电极与振子间的静电电容C1和C2出现差异,C1≠C2。
通过测量此静电电容差来检测科里奥利力,求得角速度。c) 非旋转状态的振子 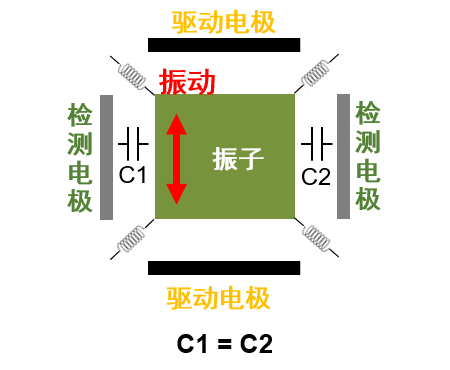
d) 旋转状态的振子 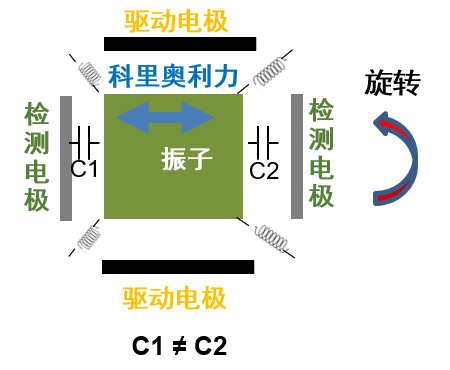
陀螺仪传感器的使用方法
陀螺仪传感器用于检测物体的运动(旋转),显示或校正该运动,并根据该运动令其做别的动作。
下面记载各自的使用例。
- 显示运动 : 汽车导航 等
在电波无法到达的地方检测并显示汽车向哪个方向转弯。 - 校正运动 : 相机抖动校正等
检测拍摄过程中的相机抖动(角度变化),校正镜头角度,消除图像失真。 - 根据运动令其做别的动作 : 汽车的侧边气囊、防侧滑(ESC) 等
检测汽车翻车,激活侧边气囊
检测汽车打滑,进行4轮的刹车控制以保持汽车姿势稳定。
加速度传感器
所谓加速度传感器
加速度传感器是检测物体运动速度变化时产生的惯性力,作为加速度以电信号方式输出的传感器。
加速度是单位时间内速度的变化率。
加速度最简单的公式如下:
a=(v2-v1)/t
- a
- : 加速度 (m/s2)
- v1
- : 点1处的速度 (m/s)
- v2
- : 点2处的速度 (m/s)
- t
- : 从a向b的运动时间 (s)
这意味着当物体在点1以v1的速度在t时间内运动到点2,达到速度v2时,加速度a为(v2-v1)/t。
(这种情况下,其前提是从点1到点2的加速度是常数)
此加速度与惯性力有着相关关系。
譬如,当你坐在车里开动车子(加速)时,你会感觉到你的身体被向后推;相反,当你停车(减速)时,你会感觉到你被向前推。
这是因为当物体的速度变化(加速、减速)时惯性力起作用之故。
惯性力与加速度具有以下关系。
F=m×a
若将其予以转换,则成为下式:
a=F/m
- F
- : 惯性力 (N)
- m
- : 物体的重量 (kg)
- a
- : 加速度 (m/s2)
换句话说,如果惯性力F可以测量,就可求得加速度。
但是,实际输出值往往用重力加速度(G)来表示。
1.0G = 9.8m/s2
加速度传感器不仅可以获得加速度(运动)信息,还可以通过信号处理获得重力、振动、冲击等信息。
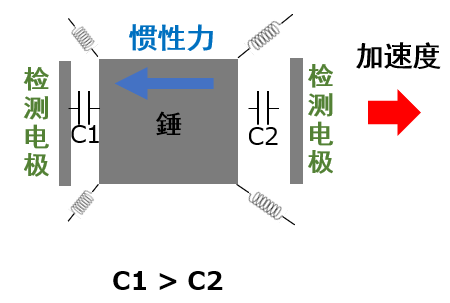
加速度传感器的原理
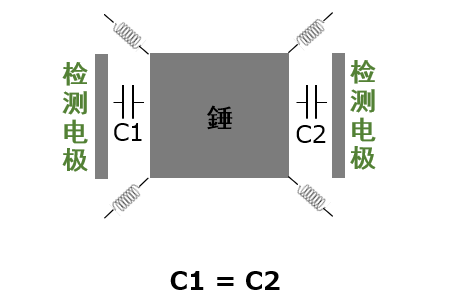
加速度传感器的基本结构与前项所述的陀螺仪传感器的基本结构相似,像陀螺仪传感器一样,包括压电方式和静电电容方式等,这里我们使用静电电容方式来简单解说其原理。
首先,如a)所示,在加速度0的状态下平衡锤处于检测电极间的中间,因此检测电极与平衡锤间的静电电容C1和C2处于相等的状态。
如b)所示,当对其施加加速度时,在相反方向会产生惯性力,平衡锤向Y轴方向偏移。
此时,检测电极与平衡锤间的静电电容C1和C2出现差异,使得C1>C2。
通过测量此静电电容差来检测惯性力,求得加速度。
加速度传感器的使用方法
加速度传感器可以检测“运动”、“重力”、“振动”和“冲击”,所以有很多利用这些信息的使用方法。
- 检测运动 : 汽车导航 等
在电波无法到达的地方,根据汽车的加速度变化来检测并显示运动距离。 - 检测重力 : 变更智能手机显示屏方向 等
检测重力加速度的变化,识别智能手机的倾斜度,并将显示屏改变为纵向或横向。 - 检测振动 : 地震仪 等
根据振动方向的加速度变化求出地震的晃动宽度和强度,并予以显示和记录。 - 检测冲击 : 气囊 等
根据加速度变化检测冲击的强度,激活汽车的气囊。
陀螺仪传感器+加速度传感器
到目前为止,我们已经分别说明了陀螺仪传感器和加速度传感器,但各自无法单独检测物体复杂的运动。
譬如,在汽车导航中,陀螺仪传感器检测运动方向,加速度传感器检测运动距离,这样即使在电波无法到达的地方,也能正确显示当前位置。
这样,越来越多的设备同时安装陀螺仪传感器和加速度传感器。
此外,检测方向不局限于1个轴,而是在2个轴(x、y方向)和3个轴(x、y、z方向)上配置传感器,实现了通过更多的信息高精度检测物体的运动。
但是,如果在3个轴上安装陀螺仪传感器和加速度传感器,最大的零部件数量将是6个,使其在空间和成本方面难以采用。
再者,由于每个传感器安装位置的偏差,数据精度恐会降低。
因此,近年来多轴一体型的陀螺仪传感器和加速度传感器、以及使得陀螺仪传感器和加速度传感器一体化的多轴惯性传感器也都实现了商品化。
松下电器也一样,通过将3轴陀螺仪传感器和3轴加速度传感器集成于单一芯片的车载6轴惯性传感器(6in1传感器)来应对市场对小型、高精度设备的要求。
相关产品信息
与本文相关的标签

这是本公司网站里“电路设计的最优解”的技术信息中,惯性传感器的基础知识的相关内容整理后的资料。