什么是自动驾驶技术中的域控制单元(DCU)?
~负责高性能化的元器件群~
2023-05-31

DCU(Domain Control Unit)是一种ECU(Electronic Control Unit),它在车载系统中对数据进行综合处理和判断,并指挥车辆的操作。随着驾驶辅助技术和自动驾驶技术的进步,预计DCU的数量将会逐年增加。我们将在本消息中就ADAS/AD用DCU的功能和系统构成进行解说,同时对构成DCU的电子零部件的产品阵容进行介绍。
1. 关于ADAS与AD的差异
ADAS(Advanced driver-assistance systems)是指先进驾驶辅助系统。它通过辅助或协助驾驶员的驾驶来设法提高行驶安全性。另一方面,AD(Autonomous Driving)是指自动驾驶,由系统来取代人进行自动驾驶。
自动驾驶被SAE(Society of Automotive Engineers:美国汽车工程师协会)定义为0~5级。0~2级,人是驾驶的主体,从3级起驾驶的主体则由人转变为车辆。
| Level | 名称 | 主体 | 驾驶区域 | 备注 |
|---|---|---|---|---|
| 0 | 无驾驶自动化 | 人 | - | 全由人来驾驶 |
| 1 | 驾驶辅助 | 人 | 有限制 | 在车辆周围环境监控等某些部分辅助驾驶 |
| 2 | 部分驾驶自动化 | 人 | 有限制 | “Hands off / 手得到解放” 在特定环境下进行自动驾驶 |
| 3 | 附带条件的驾驶自动化 | 车辆 | 有限制 | “Eyes off / 眼睛得到解放” 在特定环境下进行自动驾驶 |
| 4 | 高度驾驶自动化 | 车辆 | 有限制 | “Brain off / 脑得到解放” 在特定环境下进行自动驾驶 |
| 5 | 完全驾驶自动化 | 车辆 | 无限制 | 全由车辆来驾驶 |
2. ADAS/AD的系统构成
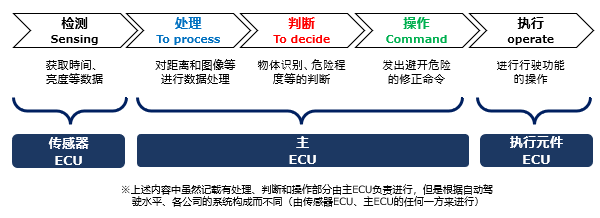
要实现ADAS/AD,需要具备传感器ECU、主ECU、执行元件ECU。
- 传感器ECU:用来识别周围环境等(摄像头、RADAR、LiDAR、超声波传感器等)
- 主ECU:用来进行数据处理或判断等(ADAS-ECU、AD-ECU、DCU等)
- 执行元件ECU:用来进行驾驶操作或辅助(加速器、刹闸、转向器、马达、发动机等)
此外,从检测到执行的流程如以下图1所示。
3. 关于域型和区型
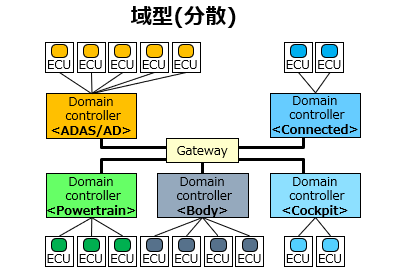
面向ADAS/AD的系统构成包括域型(分散)和区型(集中)。
- 域型:每个功能被分类为叫做域的组,按每个域将ECU集中起来。它通过网关与其他域连接起来,并在每个域ECU中进行数据处理。
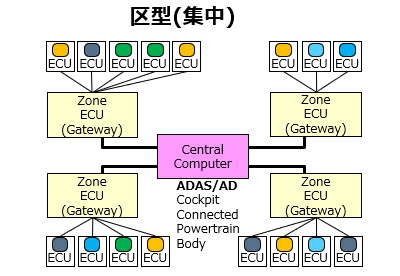
- 区型:按车身位置的每个关键点将ECU集中起来。此外,在系统中央部设置了一台中央计算机,在这里进行从关键点收集的数据处理和操作。
| 构成 | 连接 | 网络 |
|---|---|---|
| 域型 | 按各个范畴(域)将ECU集中起来 经由Gateway与其他域连接起来 由各域ECU进行数据处理 |
在Sensor ~ Domain间分别采用共通的网络标准 在Domain ~ Gateway间采用共通的网络标准 |
| 区型 | 按车身前后等每个区将不同范畴的ECU集中起来 从各个区集中到中央计算机 由中央计算机进行数据处理的整合和集中 |
在Sensor ~ Zone间不同的网络标准混在一起 在Zone ~ Central computer间采用共通的网络标准 |
4. 什么是ADAS/AD用DCU
每个功能域(例:ADAS/AD、通信、动力系统、车身、驾驶舱)都有一个DCU(Domain Control Unit)。各DCU担负着将相同域的多台设备集中起来,对数据进行综合处理和判断,并通过与其他DCU的协作和数据收发来操作车辆和设备的重任。
譬如,在面向ADAS/AD的DCU上,各种传感器设备被集中在一起,用来对数据进行综合处理和判断,并执行安全驾驶辅助和自动驾驶的操作。
5. DCU的市场&设备趋势
安装有域型系统DCU的车辆,预计以自动驾驶水平2级以下为中心将会逐渐增加。随着自动驾驶水平的进一步提高,必须相应地增加安装的传感器数量,以获取周围的环境数据。由于传感器数量的增加,DCU的数据处理量也随之增加,执行处理的主半导体的功耗也会随着性能的提高而增加。
作为面向DCU的元器件,将要求其具备“大电流”、“低损耗”、“小型化”、“高频率”、“高精度(电压)”等特点。
6. DCU的系统构成
6-1. 概要
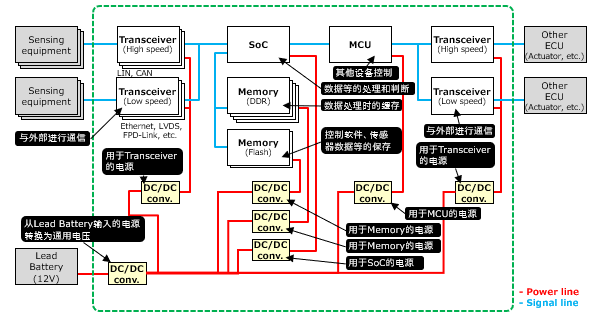
DCU及其外围设备,是按以下图3所示方式连接起来的。DCU的内部,是由与传感器ECU或其他DCU进行通信的收发器电路、对来自传感器ECU的数据进行处理和判断的SoC(System on a Chip)和各种存储器、基于由SoC做出判断的内容进行行驶控制的MCU、以及这些各种电路的动作所需的DC/DC转换器电源电路构成。
6-2. 收发器 I/F
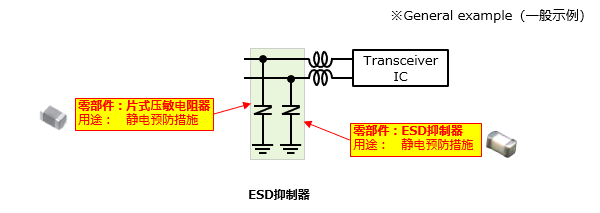
如图4中所示,收发器电路使用两根线与外部设备(CAN、Ethernet等)进行通信。此时,如果噪声或静电从通信线路混入,则恐会导致收发器IC故障。因此,收发器电路通常由用于静电预防措施的片式压敏电阻器和ESD抑制器构成。
6-3. DC/DC转换器
(1)所谓DC/DC转换器
DC/DC转换器是将一种直流电压转换成不同直流电压的电路。各自的电路所需的电压值不同,需要转换成与其相匹配的电压。DC/DC转换器的电路通常由FET、线圈、电容器构成。
(2)按类型区分的电路构成
DC/DC转换器的电路构成根据要处理的功率、电压、电流和负荷过渡响应而不同。如图5所示,电路构成大致上包括3种类型。
<TYPE A>
由于电流值非常大,使用多个线圈和FET来分担负荷电流(多相)。此外,由于剧烈的电流变动在瞬间发生会导致电压下降,因而除了使用MLCC(陶瓷电容器)外,还使用聚合物电容器来防止电压下降。
<TYPE B>
在电流大量流过的电路中使用电容大的电容器。这里也一样,除了使用MLCC(陶瓷电容器)外,还使用聚合物电容器。
<TYPE C>
这是通常的DC/DC转换器的电路。
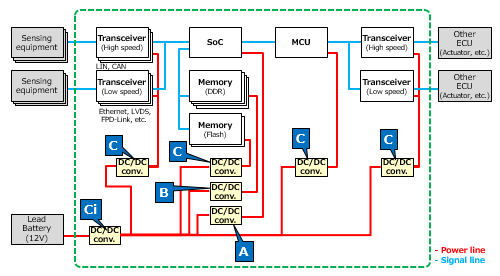
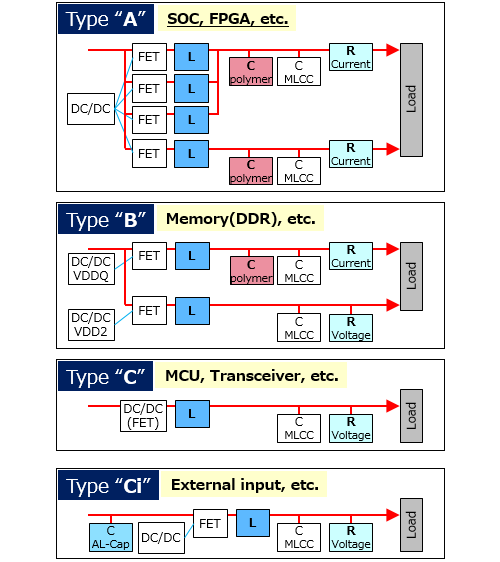
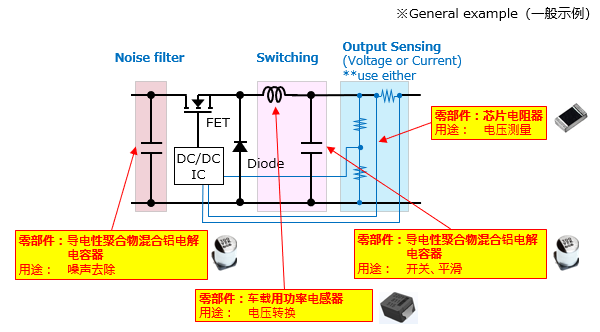
DC/DC转换器电路中,为了去除输入部的噪声和使得输出部平滑,通常使用导电性聚合物混合铝电解电容器,为了进行电压转换,通常使用车载用功率电感器,为了进行电压测量,通常使用芯片电阻器(高精度芯片电阻器)。
噪声去除、开关和平滑 ―― 导电性聚合物混合铝电解电容器
POINT- ❶ 藉由大电容、低ESR和高纹波性能,为电路的小型化和高功率化(低电压和大电流)做出贡献
- ❷ 支持高频电容特性,为宽带和高频去除电路的高频开关化中产生的噪声做出贡献
电压转换 ―― 车载用功率电感器
POINT- ❶ 藉由金属磁性材料的低损耗和大电流性能,为电路的小型化和大功率化(低电压和大电流)做出贡献
- ❷ 藉由损耗特性的高频化(低ACR),为在电路的高频开关化中抑制损耗做出贡献
7. 小结
为实现自动驾驶不可或缺的DCU,预计今后其安装数量将会不断增加。这是因为自动驾驶水平越高,就必须安装越多的传感器来获取周围的环境数据。今后,要求我们在抑制半导体功耗的同时,支持“大电流”、“低损耗”、“高频”、“小型”。作为面向DCU的产品,松下机电株式会社拥有为满足各种要求的广泛的商品群和高性能元器件(表)。
| 零部件 | 特点 | 大电流 | 低损耗 | 高频 | 小型化 |
|---|---|---|---|---|---|
导电性聚合物混合铝电解电容器 |
低ESR 高可靠性 |
✔ | ✔ | ✔ | ✔ |
车载用功率电感器  |
大电流、低损耗 高可靠性 |
✔ | ✔ | ✔ | ✔ |
芯片电阻器(高精度芯片电阻器) |
高精度、高耐热 | ✔ | |||
片式压敏电阻器 |
小型/轻量化 | ✔ | |||
ESD抑制器 |
低静电电容 超高速数据 I/F |
✔ | ✔ |
8. 相关产品信息
9. 相关信息
10. 与本文相关的标签

本文介绍了用于 ADAS/AD 的 DCU 的功能和系统配置,由于自动驾驶技术的进步,预计未来 ADAS/AD 的数量会越来越多。