什么是自动驾驶技术中的LiDAR?
~感测功能高性能化的要点~
2023-04-21

LiDAR(Light detection and ranging,光检测和测距)是一种使用激光的传感器。它依次向广范围照射激光,精确测量激光击中对象物并被反射后返回所需的时间。通过组合激光照射的方向和返回所需的时间,可以弄清到对象物的距离,通过改变照射的方向并反复测量可以识别物体。这可以说是自动驾驶汽车必不可少的一项技术,并且LiDAR的安装数量预计将逐年增加。我们将在本消息中就LiDAR的功能和系统配置进行解说,同时对构成LiDAR的电子零部件进行介绍。
什么是LiDAR?
LiDAR(Light Detection And Ranging)是一种测量激光照射对象物并被反射后返回所需时间的感测技术。在ADAS和AD系统中通常用于感测周围物体,并与摄像头、Radar、LiDAR、Sonar等组合使用。LiDAR有几种光轴可变方法(表1)。
| 光元件 | 光轴可变方式 | 类型 | 扫描方法 |
|---|---|---|---|
| LD, PD | 机械方式 | 马达旋转 | 旋转多个LD和PD并扫描整个圆周 |
| 多角镜 | 通过多角镜改变单个LD、PD的光轴并进行扫描 | ||
| 非机械方式(固态) | MEMS反射镜 | 通过MEMS反射镜改变单个LD、PD的光轴并进行扫描 | |
| 相位阵列 | 通过波导路改变单个LD、PD的光轴并进行扫描 | ||
| 闪光 | 广范围照射LED等光源,并通过PD阵列一次性扫描反射光 |
距离测量和物体识别方法
距离测量和物体识别方法如下所示
<距离测量>
从激光二极管照射激光脉冲,光电二极管接受来自对象物的反射光。根据从照射到受光为止的时间来测量与物体间的距离。
<物体识别>
使用激光脉冲照射时的方向和距离,创建点云图像。使用该图像来识别人或物体等的种类。点云是指以点的集合来表示物体的位置信息。
LiDAR的活用方法
车载LiDAR的活用方法包括以下3种。
识别障碍物
根据获取的点云图像识别障碍物。
创建动态地图
组合点云数据和三维地图数据,创建数据作为自动驾驶所需的动态地图的基础 。
把握/修正自身车辆位置
根据动态地图把握自身车辆的行驶位置和周围的障碍物等,并修正为正常的行驶位置。
LiDAR的市场和设备趋势
随着自动驾驶汽车数量的增加和自动驾驶水平的提高,预计LiDAR的安装数量将会增加。随着自动驾驶水平的提高,相应地对LiDAR的感测功能提出了高性能化的要求。今后,要求构成LiDAR的电子零部件具备的功能和性能包括“高功率化”、“通信高速化”、“小型化/轻量化”,各自必须具备的条件如下:
●高功率化
要想提高障碍物的识别精度,获取的点云必须更精细。如果数据的处理量因高分辨率化而增加,主CPU等半导体的功耗也会增加,因此高功率化不可或缺。
●通信高速化
随着数据量的增加,对高频、高速传输处理能力提出了更高的要求。
●小型化/轻量化
除了上述课题外,还需要缩小电子零部件的尺寸。
关于LiDAR的系统配置
总体配置
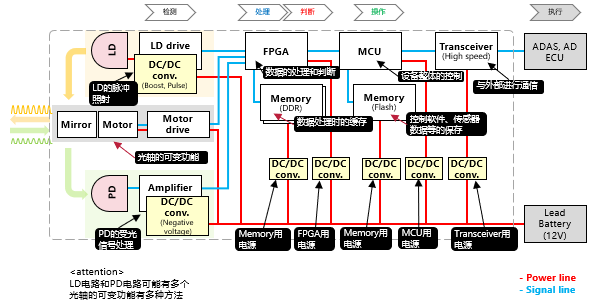
LiDAR系统由下述零部件构成,图1示出系统配置。
●激光二极管: 高速通过脉冲状的电流,照射具有相同波长和相位的脉冲状的激光。
●光电二极管: 发挥着将光转换成电信号的作用。电流和电压是由于受光而产生的。在光电二极管受光电路置入放大器,令输出电压放大。
●FPGA: 即使在置入产品后也可以改写电路以设定任意逻辑电路配置的集成电路。
●MCU(微型计算机): 向外部ECU发出控制指令。
●收发器: 用来与外部进行通信的元器件或者电路。
●存储器(DDR): 作为数据处理时的缓存使用。
●存储器(闪存): 保存控制软件或传感器数据
●DC/DC转换器: 将电池提供的电压转换为每个电子零部件或电路所需的电压。
个别电路及构成零部件
DC/DC转换器
在DC/DC转换器电路中,为了去除输入部的噪声和使得输出部平滑,通常使用导电性聚合物混合铝电解电容器,为了进行电压转换,通常使用车载用功率电感器,为了进行电压测量,通常使用芯片电阻器(高精度芯片电阻器)。
噪声去除、开关和平滑 ―― 导电性聚合物混合铝电解电容器
POINT- ❶ 藉由大电容、低ESR和高纹波性能,为电路的小型化和高功率化(低电压和大电流)做出贡献
- ❷ 支持高频电容特性,为宽带和高频去除电路的高频开关化中产生的噪声做出贡献
电压转换 ―― 车载用功率电感器
POINT- ❶ 藉由金属磁性材料的低损耗和大电流性能,为电路的小型化和大功率化(低电压和大电流)做出贡献
- ❷ 藉由损耗特性的高频化(低ACR),为在电路的高频开关化中抑制损耗做出贡献
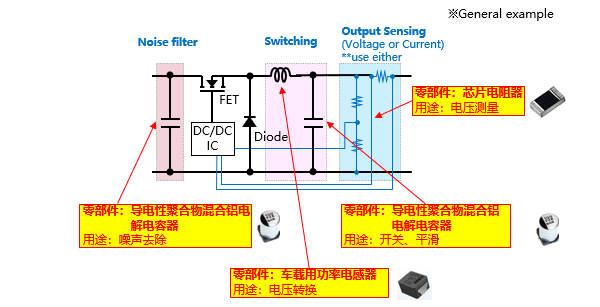
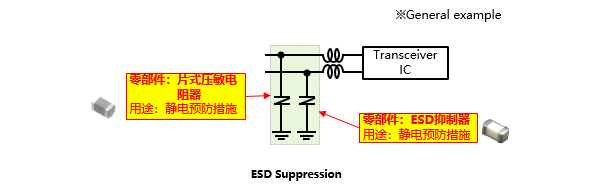
收发器 I/F
如图中所示,在收发器电路中使用两根线与外部设备(CAN、Ethernet等)进行通信。这里必须注意的是静电和噪声。这是因为如果静电或噪声从通信线路进入,在最坏的情况下会导致电子零部件的故障。通常由用于静电预防措施的片式压敏电阻器和ESD抑制器构成。
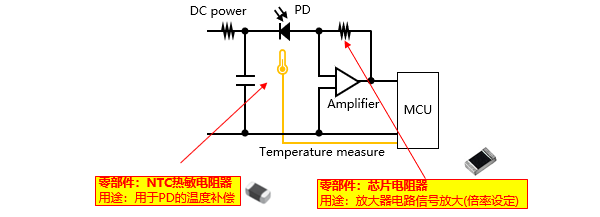
光电二极管受光电路
光电二极管输出与入射的光强度成比例的电流。由于激光反射光较弱,必须使用放大器电路来放大信号。要实现高精度的放大器电路,需要高精度的芯片电阻器和对于因温度而引起的特性变化予以补偿的热敏电阻器。
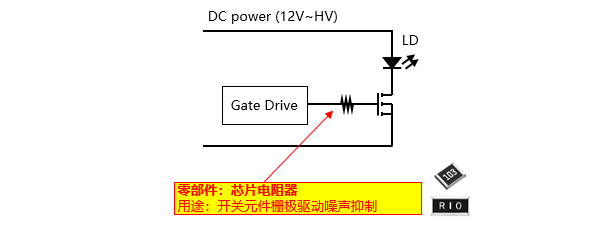
激光二极管照射电路
照射电路非常简单,由激光二极管、FET(GaN)和栅极电阻器构成。为了进行高速、大电流的脉冲照射,需要高精度地进行FET(GaN)的ON/OFF。此外,抑制ON/OFF时的噪声也很重要,需要使用支持高功率的栅极电阻器。
小结
随着自动驾驶汽车数量的增加和自动驾驶水平的提高,预计LiDAR将会增加。随着自动驾驶水平的提高,对感测功能提出了更高的高性能化要求。汽车上安装的以LiDAR为首的传感器元器件数量可能会增加,但不会减少。对于在此类元器件及其外围电路中使用的电子零部件,无疑 会提出“低损耗”、“大电流”、“高频”和“小型化”的要求。松下机电株式会社备有面向LiDAR的广泛的产品阵容(表2)。 表2 商品阵容和特点一览
| 零部件 | 特点 | 大电流 | 低损耗 | 高频 | 小型化 | 高精度 |
|---|---|---|---|---|---|---|
导电性聚合物混合铝电解电容器 |
低ESR 高可靠性 |
✔ | ✔ | ✔ | ✔ | |
车载用功率电感器  |
大电流、低损耗 高可靠性 |
✔ | ✔ | ✔ | ✔ | |
 |
高精度、高耐热 | ✔ | ✔ | |||
片式压敏电阻器 |
小型/轻量化 | ✔ | ||||
ESD抑制器 |
低静电电容 超高速数据 I/F |
✔ | ✔ | |||
NTC热敏电阻器(片式) |
小型、高耐热 | ✔ | ✔ |
相关产品信息
相关信息
与本文相关的标签
本资料中,我们就LiDAR的功能和系统配置进行解说,并介绍构成LiDAR的电子零部件。